ros-mcp-server
by robotmcp·★ 1,224·综合分 55
ROS MCP Server 无需修改现有机器人代码即可将 Claude 和 GPT 等 AI 模型通过 ROS 与机器人连接。
developer-toolsai-llmops-infra
183
Forks
39
活跃 Issue
2 个月前
最近提交
56 天前
收录于
概述
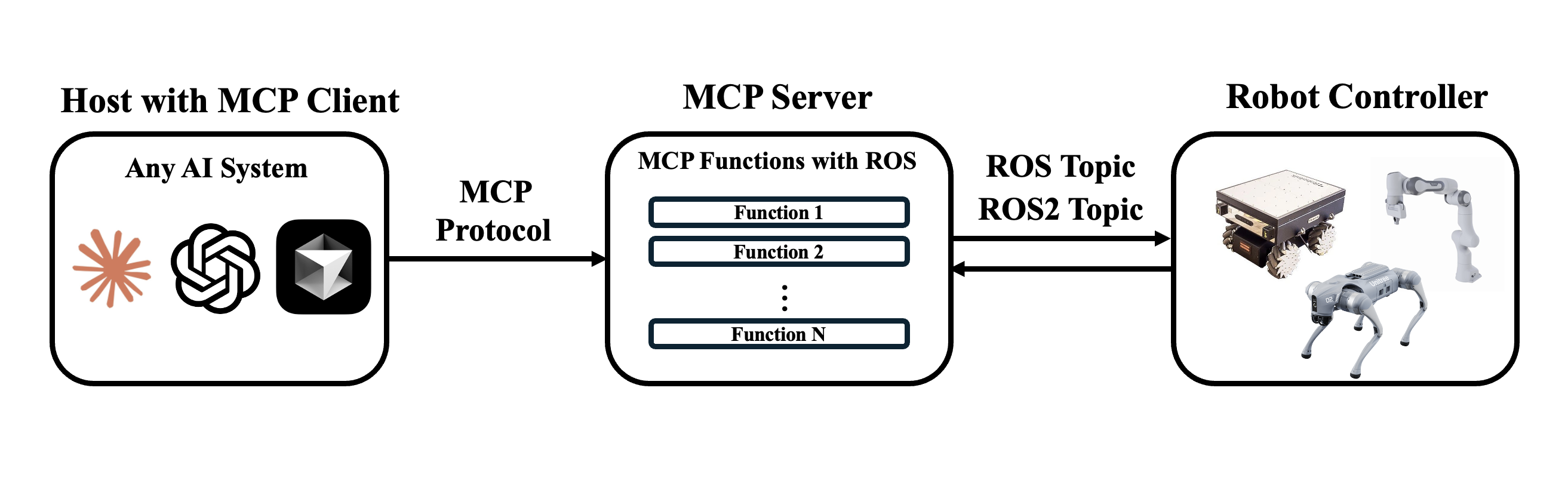
ROS MCP Server 是 MCP 协议的一个 Python 实现,使 AI 语言模型与运行 ROS(机器人操作系统)的机器人之间能够双向通信。它无需更改现有机器人源代码,只需添加一个 rosbridge 节点。该服务器允许 LLM 发布和订阅主题、调用服务和操作、设置参数、读取传感器数据,并实时监控机器人状态。它提供深入的 ROS 理解,指导 LLM 发现可用的主题、服务、操作及其类型(包括自定义类型),从而无需手动配置即可正确使用。
试试问 AI
装完之后,这里有 5 个你可以让 AI 做的事:
你:在仿真环境中控制机械臂
你:为四足机器人实现自然语言控制
你:通过自然语言查询调试工业机器人
你:这是否需要修改我现有的机器人代码?
你:支持哪些 ROS 版本?
什么时候选它
当你需要AI模型与运行ROS的机器人交互,且不想修改现有机器人代码时,选择这个。
什么时候不要选它
如果你的机器人不使用ROS,或者你需要与非MCP AI平台的紧密集成,不要选择它。
可对比工具
rosbridgeros2-mcpweb-ros
安装
安装
- 通过 pip 安装包:
``bash pip install ros-mcp-server ``
- 设置您的 ROS 环境(ROS 1 或 ROS 2)
- 将 rosbridge 节点添加到您的 ROS 设置中
- 使用以下配置配置您的 MCP 客户端(例如 Claude Desktop):
``json { "mcpServers": { "ros": { "command": "python", "args": ["-m", "ros_mcp_server.server"], "env": {} } } } ``
FAQ
- 这是否需要修改我现有的机器人代码?
- 不需要,您只需要在现有的 ROS 设置中添加 rosbridge 节点,无需修改任何机器人源代码。
- 支持哪些 ROS 版本?
- ROS-MCP 支持 ROS 2(Jazzy、Humble 等)和 ROS 1 发行版。
Hacker News 讨论
开发者社区最近的相关讨论。
- 帖子 by r-johnv · 2025-09-10
ros-mcp-server 对比
最后更新于 · 由 README + GitHub 公开数据自动生成。