robotmcp_client
by robotmcp·★ 12·综合分 42
ROS 机器人集成 MCP 客户端,支持 Gemini、Ollama 等大语言模型。
developer-toolsai-llmops-infra
5
Forks
8
活跃 Issue
2 个月前
最近提交
56 天前
收录于
概述
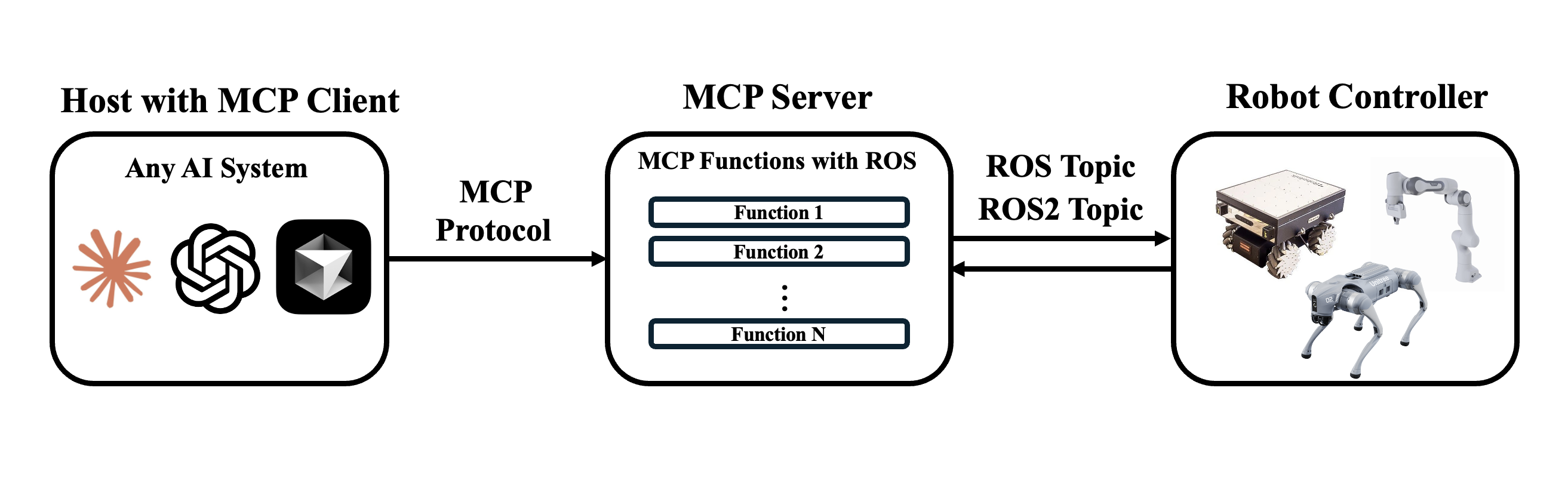
ROS MCP Client 实现 MCP 客户端规范,将大语言模型与 ROS 和 ROS2 机器人连接。它提供双向通信通道,允许向机器人发送自然语言命令,并将实时传感器数据流式传输回 AI 模型。项目采用模块化架构,包含 Gemini Live 等专用客户端,实现离线机器人 AI 控制器。
试试问 AI
装完之后,这里有 5 个你可以让 AI 做的事:
你:通过自然语言命令控制机器人
你:使用 LLM 处理实时传感器数据
你:离线机器人 AI 控制器
你:此客户端连接到哪些 MCP 服务器?
你:我能否将其与其他机器人框架一起使用?
什么时候选它
当您需要通过MCP协议将大语言模型与ROS/ROS2机器人连接,实现自然语言交互、测试或自主控制时,应选择此客户端。
什么时候不要选它
如果没有设置ROS或ROS2环境,则不适用,因为它需要同时运行ros-mcp-server和rosbridge才能正常工作。
可对比工具
ros-mcp-serverrosbridge-servershell-mcp
安装
安装
- 克隆仓库
git clone https://github.com/robotmcp/ros-mcp-client.git
cd ros-mcp-client- 安装依赖
uv sync # 或 pip install -e .- 设置 Gemini Live 客户端(示例)
cd clients/gemini_live
./setup_gemini_client.sh
uv run gemini_client.py- 在目标机器人上启动 rosbridge
ros2 launch rosbridge_server rosbridge_websocket_launch.xmlFAQ
- 此客户端连接到哪些 MCP 服务器?
- 它专门连接到 ros-mcp-server,该服务器通过 MCP 暴露 ROS/ROS2 功能。
- 我能否将其与其他机器人框架一起使用?
- 该客户端专为带有 rosbridge 的 ROS/ROS2 机器人设计,可能需要适配才能与其他机器人框架一起使用。
robotmcp_client 对比
最后更新于 · 由 README + GitHub 公开数据自动生成。