ros-mcp-server
by robotmcp·★ 1,224·Score 55
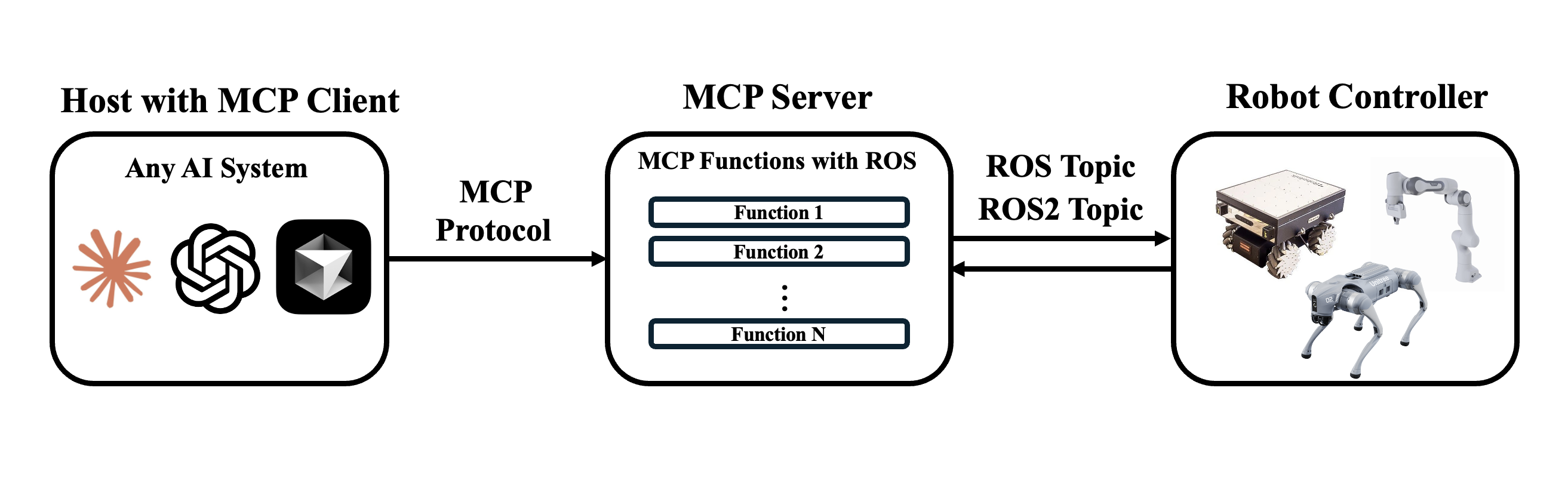
ROS MCP Server connects AI models like Claude & GPT with robots via ROS without changing existing robot code.
Overview
ROS MCP Server is a Python implementation of the MCP protocol that enables bidirectional communication between AI language models and robots running ROS (Robot Operating System). It requires no changes to existing robot source code, only adding a rosbridge node. The server allows LLMs to publish and subscribe to topics, call services and actions, set parameters, read sensor data, and monitor robot state in real time. It provides deep ROS understanding, guiding the LLM to discover available topics, services, actions, and their types including custom ones, enabling proper usage without manual configuration.
Try asking AI
After installing, here are 5 things you can ask your AI assistant:
When to choose this
Choose this when you need AI models to interact with robots running ROS without modifying existing robot code.
When NOT to choose this
Don't choose this if your robot doesn't use ROS, or if you need tight integration with non-MCP AI platforms.
Comparable tools
Installation
Installation
- Install the package via pip:
``bash pip install ros-mcp-server ``
- Set up your ROS environment (ROS 1 or ROS 2)
- Add the rosbridge node to your ROS setup
- Configure your MCP client (e.g., Claude Desktop) with:
``json { "mcpServers": { "ros": { "command": "python", "args": ["-m", "ros_mcp_server.server"], "env": {} } } } ``
FAQ
- Does this require modifying my existing robot code?
- No, you only need to add the rosbridge node to your existing ROS setup without modifying any robot source code.
- Which ROS versions are supported?
- ROS-MCP is compatible across ROS 2 (Jazzy, Humble, and others) and ROS 1 distributions.
On Hacker News
Recent discussion from the developer community.
- Story by r-johnv · 2025-09-10
Compare ros-mcp-server with
Last updated · Auto-generated from public README + GitHub signals.